
SES adjust 3D TSD Geosteering Software
SES adjust 3D TSD Geosteering Software
SES contains directional steering technology called FDDC steering guidance. The technology is based on a U.S. Patent granted in 2000. FDDC is an abbreviation for Fuzzy Logic Drilling Direction Controller. FDDC takes THD as input and uses Fuzzy Logic and steering rules to calculate changes to directional drilling tool setting adjustments/modes. FDDC output is available in SES to assist directional drillers, and to help monitor directional steering decision-making and oversight.
FDDC steering guidance is calculated at each survey station with sufficient respective well plan inclination. A technical paper about FDDC steering guidance was published in 2003 and a similar paper is here. A 2007 presentation about FDDC use and geosteering is here. The U.S. patent is also a reference to interested parties.
FDDC steering guidance is relative and how to "change". For example, "Towards DROP 40%" could mean to continue drilling high side, but Less with respect to what occurred during the last survey station interval and with respect to what in general is considered to be a Very Large steering adjustment with the current bottom hole assembly in the current sized hole.
To very briefly explain general concepts, two different example FDDC rules are pictured below. On the left, the actual path is below the plan ([VD] is <LOW>) and not progressing much ([RCVD] is <ZERO>) so <BUILD_SOFT> is fired. On the right is a different scenario in which the actual path is above the plan ([VD] is <VERY_HIGH>) and ([RCVD is <NEGATIVE_BIG>) so <LEAVE ALONE> is fired.
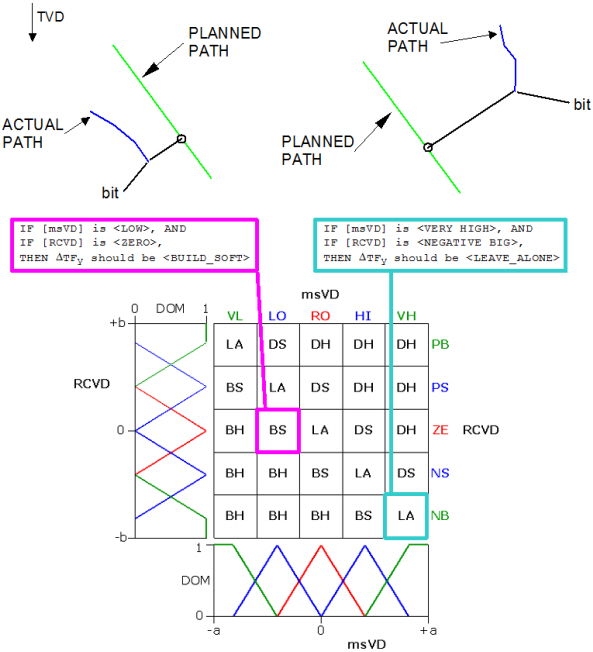
There's nothing fuzzy about the logic as the two preceding example rules match common sense. There are 100s of rules in FDDC and each can be isolated to basic fundamental steering concepts that humans apply each day without hesitation. Input and output terms are described with Fuzzy Sets and Fuzzy Logic is used to calculate resulting steering guidance.
In the below picture from SES, FDDC steering guidance at MD (9306 ft) from THD VD (8.43 ft high of plan) and RCVD (-79 ft/1000ft) and ID (5.51 deg low of planned inclination) and RCID (-6.1 deg/100ft) is..."Towards BUILD 60%"; in other words significantly more steering towards high-side is being advised at MD 9306 ft even though the wellbore is currently 8.43 high of the well plan. That's not intuitive, and ID isn't discernable from a vertical section view.
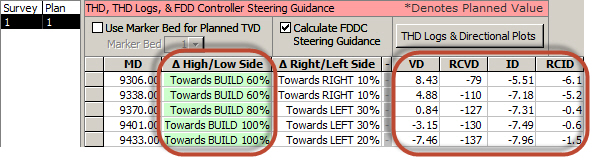
Again, "D High/Low Side" FDDC output is a % value with respect to what's considered to be an absolute large respective change. For example, if the last "Kelly-down"—or more-precisely the last measured depth distance between two successive directional survey stations—the wellbore was largely drilled in rotary mode and if steering guidance was then "Towards BUILD 100%", this could be interpreted as suggesting that the next Kelly-down be drilled predominantly in a high-side manner, whether that be via PDM TFO high-side sliding, or by rotary-steerable means. For another example, if the last Kelly-down was largely drilled low-side and steering guidance was then advised to be "Towards BUILD 100%", this could be interpreted as suggesting that the next Kelly-down be drilled predominantly in a rotary or non-oriented/non-sliding manner (i.e., a large change from drilling entirely low-side prior). Thus, FDDC steering guidance is contextual with recent directional control actions.
If an SES user is using FDDC steering guidance to generally monitor directional control performance while drilling, then successive directional survey stations with repeated "Towards XXX 100%" may instigate communications with the directional driller to determine the root cause, especially if still drilling the curve before the horizontal landing. Even when drilling a horizontal wellbore that will be geosteered, the geometric well plan is usually honored until 50-75 degrees wellbore inclination is achieved. If repeated "Towards XXX 100%" is occurring while the live drilling wellbore is in the curve, there could be multiple explanations ranging from a break-down in well plan communications and steering desires or simply a bottom hole assembly that is not currently performing; or even a personnel problem.
Rewind to the 1990s...A directional drilling simulator was originally created with which to design FDDC. The simulator was a 3D finite element model incorporated with a drill-ahead model. The finite element model was a static analysis of a rotary-steerable bottom hole assembly. The drill-ahead model was based on laboratory data and a simulation model proposed by Millheim and Warren in 1978 and Brett et al. in 1986.
Progress was slow. In the beginning the design efforts experienced all of the common problems associated with complex controllers: well path instability and controller-parameter sensitivity. THD and FDDC were being invented simultaneously.
FDDC eventually produced simulated results with seriously noteworthy characteristics. Consider the following two vertical section views that were created with the simulator and FDDC. The first graph presents six TVD corrections for a horizontal well where initial vertical deviations varied from 3 feet to 8 feet and initial wellbore inclination was 90 degrees. The second vertical section view presents three entire horizontal wells modeled from KOP through the horizontal section.
All nine smooth well bores were "drilled" with the same FDDC. FDDC parameters were kept constant in all cases, while initial conditions, well plans, and formation parameters were significantly varied. The performance suggests generality and the right overall design structure.
Every controller has parameters that directly affect the computed output and those parameters must be tuned. Classical controllers (e.g., P, PI, PID) typically have a very small number of parameters, therefore, "choosing" or tuning to find the "right ones" usually does not result in a general controller. In other words, take a tuned classical controller and simply change the initial conditions and directional control performance becomes heavily degraded. FDDC has more than one hundred control parameters but common-sense human intelligence gets most of them "close-enough" and the remaining few are tuned. That's the power of Fuzzy Logic rule-based systems.
10000s of documents have been published about Fuzzy Logic theory and applications. Searching on "Fuzzy Sets" at Amazon.com returns over 1000 books. Even decades ago several industries had successfully applied Fuzzy technology to solve real problems for commercial benefit. See the dated table below that lists commercial applications that employ Fuzzy Logic. The sources are:
1) Kosko, Bart. 1993. Fuzzy Thinking: The New Science of Fuzzy Logic. New York, New York: Hyperion.
2) McNeill, Daniel, and Paul Freiberger. 1994. Fuzzy Logic. The Revolutionary Computer Technology That Is Changing Our World. New York, New York: Simon & Schuster Inc.
Product Description |
Company |
| air conditioner | Hitachi, Matsushita, Mitsubishi, Sharp |
| aircraft control | Rockwell Corp. |
| anti-lock brakes | Nissan |
| auto engine | Nissan |
| auto transmission | Honda, Mitsubishi, Nissan, Saturn, Subaru |
| cement kiln control | Mitsubishi Chemical |
| chemical mixer | Fuji Electric |
| copy machine | Canon |
| cruise control | Isuzu, Nissan, Mitsubishi |
| dishwasher | Matsushita |
| dryer | Matsushita |
| elevator control | Fujitec, Mitsubishi Electric, Toshiba |
| factory control | Omron |
| golf diagnostic system | Maruman Golf |
| handwriting recognition | Sony |
| health management system | Omron |
| humidifier | Casio |
| iron mill control | Nippon Steel |
| kerosene heater | Matsushita |
| microwave oven | Hitachi, Matsushita, Sanyo, Sharp, Toshiba |
| plasma etching | Mitsubishi Electric |
| refrigerator | Matsushita, Sharp |
| rice cooker | Matsushita, Sanyo |
| shower system | Matsushita |
| still camera | Canon, Minolta |
| space shuttle docking | NASA |
| stock trading | Yamaichi |
| subway control system | Hitachi |
| television | Goldstar, Hitachi, Samsung, Sony |
| translator | Epson |
| toaster | Sony |
| traffic control system | Matsushita |
| vacuum cleaner | Hitachi, Matsushita, Toshiba |
| video camcorder | Canon, Matsushita, Sanyo |
| washing machine | Goldstar, Hitachi, Matsushita, Samsung, Sanyo, Sharp |
Fuzzy set theory was invented by Dr. Lotfi Zadeh in 1965. The first commercial applications of Fuzzy Logic addressed control problems (e.g., controller for a cement kiln; controller for a high-speed train). Fuzzy systems debuted within the Petroleum Industry as fuzzy expert systems (e.g., fluid selection for stimulation).